




Imaging a harvester that combines the best technologies from other working machines. Electric motors in the separate controlled wheels, pendulum arms, adjustable width, low CG, low soil impact – a machine with the power and benefits of an excavator but moves like a crab fish in the forest. Does it exist? Well, almost …
Some people claim that launching of “news” within the forestry machine business is very rare. There are of course news turning up every now and then but in most cases it´s about relatively small changes – the skidders, harvesters and forwarders look more or less the same as they have for ages. But that doesn´t mean that people have stopped thinking.
There are inventors that think outside the classic boxes. Their problem is often that they have to finance their projects themselves, meaning the machines will never leave the drawing board. It doesn´t necessarily mean that the ideas are bad, there could be at least parts of it that have potential for success?
One of those inventors is the engineer/machine dealer/contractor Jürgen Hartig in Germany. He was a typical German forest contractor in the 80´s, working with German machines in a German whole tree system. By the end of the 80´s he went to the Elmia show in Sweden to have a look at Scandinavian technology that he had heard so much about. He fell in love with the Skogsjan harvester and it´s pendulum arms. 
Shortly after the visit to the Elmia show Jürgen managed to arrange a meeting with Mr. Skogsjan himself, Jan Eriksson, to see the machine in full action in the forest. The plan was to buy a Skogsjan harvester and to offer to take care of the dealership for the German market. It didn´t go to plan. The problem was that Skogsjan at this time only produced a few machines per year which was not enough to enter a new export market. So, Jürgen had to go home without his “dream machine”.
Prototype HP 120
When visiting the Skogsjan factory Jürgen had noticed that most of the main components were made in Germany. How difficult could it be to build your own machine? he thought. In 1990 a prototype called the HP 120 was rolling out from his workshop. It had four wheels on pendulum arms, a 120 KW Mercedes engine and the first (according to Jürgen) parallel crane in Germany, made by the Finnish crane manufacturer Pika. The crane was mounted next to the rotatable cabin, just like on Skogsjan. The transmission was controlled from four hydraulic pumps, one for each wheel. Sensors that sensed the steering angle controlled each pump to give the exact amount of oil to “its” wheel so that each wheel always had the right speed, also in curves. This to avoid slipping and ground damage.
The patent and drawings were sold to a small machine manufacturer who built a series of seven machines. Jürgen went on to work with the prototype, with some adjustments along the way, for 11 000 machine hours, until 2002. 
The hurricane Lothar aroused new ideas
To work with the cleaning up after the 1999-hurricane Lothar in Germany Jürgen found himself operating a large tracked excavator equipped with a Keto 1000 felling head. He didn´t really like the tracked transmission of the excavator but had to admit that the rest of the machine, with engine, hydraulics, crane and cabin together, actually was a good concept.
Already then, in 2000, there were wheeled machines with “excavator bodies” available on the market but Jürgen thought that the CG (center of gravity) was too high on such machines as they all had the body of the machine on top of the transmission. To compensate this the machines has to be heavy and wide which brings problems during transport on public roads. At the same time, the trend in 2000 in Germany was pointing at larger felling heads meaning that you had to have a stable base unit to be able to operate the head on a, at least, 10-meter crane. Jürgen saw three possibilities:
- Increase the weight of the base unit
- Lower the CG of the machine
- Make the machine wider
Option 2 seemed to be the right one to move on with. A wheeled, low chassis with a excavator body. 
Harvester with electric wheel motors
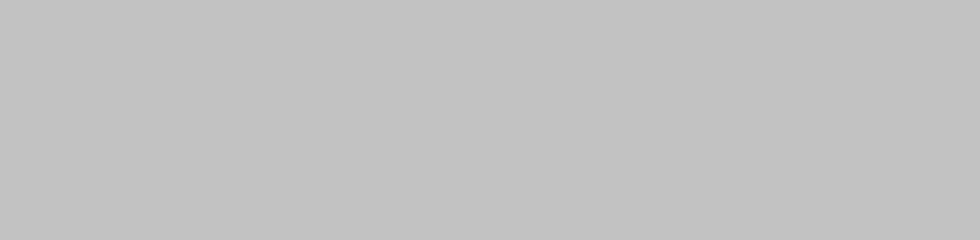
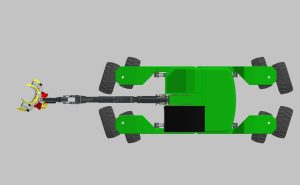
The result was a machine with four twin wheels, eight wheels with 600/55-26.5 tires. One pair in each corner of the machine, mounted on pendulum arms. Each pair can turn 180° which also is the steering of the machine. Theoretically the machine can be driven sidewards (more on this below). On top an excavator body should be mounted, one that already exists meaning that Jürgen didn´t have to build a complete harvester, just the chassis.
When the concept was first presented at a meeting with manufacturers and researchers at KWF (the German Centre for Forest work and Technology) in 2002 the wheels were meant to be equipped with hydraulic motors. At this point the interest among the manufacturers was very low.
Improved concept
Later, Jürgen came in contact with the Technical University in Dresden who were working with “energy efficient transmissions for working machines”. They presented a new type of electrical transmission with very precise speed control that seemed to suit this project perfectly. This system was also very easy to install compared to the hydraulic system, so it was decided that the transmission should be electrical from now on. As on Jürgens first harvester each wheel is controlled by a computer to get the exact right speed due to its turning angle, avoiding ground damage.
The crane and other functions are served by a conventional hydraulic system driven by a diesel engine that also drives a electrical generator for the wheels.
Also a suitable excavator body was found. The Kern HE 50.1 is a small purpose-built tracked harvester for young thinning’s. The idea is to take the body of such a harvester and put it on Jürgens wheeled chassis. Now Jürgen could present a complete harvester, or at least CAD-illustrations and drawings.
Adjustable width
As the wheel pairs are eccentric the width of the machine can be changed by turning the wheels 180° as on the illustration below. Like this the width of the machine can be adjusted between 3,0 and 3,6 meters. You can also set the width to 3,3 meters. If the turning point of the wheel pairs is changed you can get a width between 3,0 up to 4,0 meters. When a wheel pair is turned 180° its electric motor automatically switches direction. 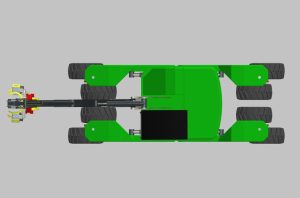
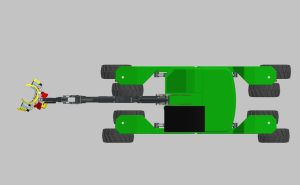
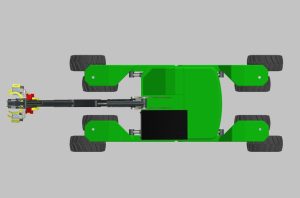
With this steering you can turn the machine around on a coin or even drive sidewards as mentioned above. Also you can set the front and rear wheels to go in different tracks, which could be suitable when operating in soft or wet soil.
The length of the machine is 8,1 meters. The height, with 0,54 meters (working mode) ground clearance, is 3,7 meters. The ground clearance could be set from close to zero up to approx. 0,8 meters.
Conclusion
Theoretically this should be a very flexible machine that combines different benefits of other machines. Pendulum arms, electric motors, twin mounted wheels or excavator harvesters is nothing new but all together it becomes something that no one has seen so far. It would be most interesting to see a prototype in action.
Jürgen will be 70 this year and he claims that if he was 35 he would have built one machine of this concept. Facing reality, he is now hoping that someone else will take over and bring the project over the finish line.
If you want to practice your skills in the German language you can have look under this link to see more about it: Pendelarmharvester






Interesting post!
Keep up the good work Per!
Looking forward to reading more from you!
Per A